https://doi.org/10.29059/cienciauat.v19i2.1895
Evaluación
de desempeño de controladores para un sistema de dedo biónico
Performance evaluation of controllers for a bionic
finger system
Desempeño
de controladores para dedo biónico
Erick
Javier Sánchez-Garnica1, Liliam Rodríguez-Guerrero1*,
Rocío Ortega-Palacios2, Omar Jacobo Santos-Sánchez1
*Correspondencia:
liliam_rodriguez@uaeh.edu.mx/Fecha de recepción: 15 de marzo de 2024/Fecha de
aceptación: 25 de septiembre de 2024/Fecha de publicación: 4 de octubre de
2024.
1Universidad
Autónoma del Estado de Hidalgo, Instituto de Ciencias Básicas e Ingeniería,
Área académica de computación y electrónica, carretera Pachuca-Tulancingo km
4.5, Carboneras, Mineral de la Reforma, Hidalgo, México, C. P. 42184. 2Universidad
Politécnica de Pachuca, Ingeniería Biomédica, Zempoala, Hidalgo, México, C. P.
43830.
RESUMEN
Los avances
tecnológicos han permitido el desarrollo de dispositivos para suplir la pérdida
de un miembro del cuerpo, sin embargo, su costo actual todavía los hace
inaccesibles para personas de escasos recursos y, en muchos casos, incluso con
ingresos moderados. Existe un amplio desarrollo tanto científico, como
aficionado, de dedos biónicos, pero es común que no se considere alguna técnica
de control para manipularlos. El objetivo del presente estudio fue evaluar el
desempeño de cuatro tipos de controladores de lazo cerrado, en el
funcionamiento estable de un dedo biónico. Se trabajó con los controladores
proporcional más compensación, proporcional óptimo más compensación,
proporcional integral por asignación de polos y proporcional integral por
Ziegler-Nichols, en un dedo biónico adaptado específicamente para su estudio.
Se utilizó la teoría de control para
determinar cuál controlador mostraba un mejor efecto en el sobreimpulso
y las oscilaciones del dedo biónico. El controlador de tipo proporcional más
compensación presentó el mejor desempeño afectando menos el sobreimpulso y las
oscilaciones en la señal de control, demostrando su viabilidad para ser
utilizado en dispositivos biónicos para su posible incorporación en una
prótesis de mano, destinada a ayudar a las personas amputadas a recuperar parte
de sus capacidades disminuidas.
PALABRAS CLAVE: dedo
biónico, control óptimo, control proporcional.
ABSTRACT
Technological
advances have enabled the development of devices to compensate for the loss of
a limb; however, their current cost still makes them inaccessible for people
with limited resources and, in many cases, even for those with moderate
incomes. There is extensive development, both scientific and amateur, of bionic
fingers, but it is common for control techniques to be overlooked in their
manipulation. The objective of this study was
to evaluate the performance of four types of closed-loop controllers in
the stable operation of a bionic finger. The
controllers used were proportional plus compensation, optimal
proportional plus compensation, proportional-integral with pole placement, and proportional-integral with Ziegler-Nichols
tuning, in a bionic finger specifically
adapted for this study. Control theory was applied to determine which
controller had a better effect on overshoot and oscillations in the
bionic finger. The proportional plus compensation controller showed the best
performance, with less impact on overshoot and control signal oscillations,
demonstrating its viability for use in bionic devices and its potential incorporation into a hand prosthesis to help amputees
regain part of their diminished capabilities.
KEYWORDS: bionic finger, optimal control, proportional control.

INTRODUCCIÓN
El
vivir con una discapacidad, particularmente una amputación,
limita considerablemente la ejecución de movimientos en la cotidianeidad y esta condición se agrava cuando
no se tienen los recursos económicos para adquirir una prótesis biónica, ya que
su costo puede alcanzar los 250 000 dólares, como es el caso del modelo
Michelangelo de la empresa Ottobock (Ottobock, 2013). Existen opciones un poco
más económicas, como el modelo Hero Arm de Open Bionics (Open Bionics, 2021)
con un costo de 10 000 dólares. Otras empresas, con productos y precios
similares, son The Winkley Company (Winkley,
1888), BioparrX (Bioparx, 2018), P4H Bionics (P4HBionics, 2020).
En México, la Academia
Nacional de Medicina reportó que se realizan alrededor de 75 amputaciones
diarias, y que en 2014 la cantidad de personas con esta condición ascendía a 900 000, dato que contrasta con las 1
500 prótesis que son fabricadas al año por diversas instituciones, como el
Instituto Nacional de Rehabilitación, el Instituto Mexicano del Seguro Social y
el Sistema para el Desarrollo Integral de la Familia (Vazquez-Vela, 2016), lo
que deja de manifiesto la necesidad de este tipo de dispositivos en el país.
La comunidad de
software y hardware libre, conocida como el “movimiento maker” (Dougherty,
2012), ha desarrollado diversos proyectos de
prótesis que pueden descargarse de la red e imprimirse en 3D. Aunque la
mayoría de estos dispositivos son mecánicos, también existen aquellos que
incorporan servomotores para realizar el movimiento de la mano. Sin embargo, es
difícil encontrar información sobre cómo controlar estos dispositivos más allá
del simple movimiento de los servomotores. Algunos ejemplos de estos proyectos
se pueden ver en los trabajos de Burton
(2016), Gross (2017), Open Bionics (2017) y Duran (2019); pero todos
ellos carecen de sensores para determinar la posición de los dedos, lo que
impide implementar un control en lazo cerrado.
La comunidad
científica ha realizado diversas
publicaciones al respecto, que abarcan desde el diseño mecánico hasta la
incorporación de sensores y motores para realizar movimientos fluidos. Un
ejemplo se puede observar en Kashef y col.
(2020), quienes presentaron una comparación exhaustiva de diferentes
diseños de dedos biónicos, entre los que destacan los modelos actuados por
tendones (Jung y col., 2008), mecanismos de 4 barras simples (Jang y col.,
2013) y compuestos (Yoon y Choi, 2017). Sin embargo, la mayoría de los modelos
descritos se centran en el diseño del dedo y no en la forma de controlarlos.
En los diseños con
mecanismos de 4 barras, se pueden considerar los trabajos de Li y col. (2017),
Imbinto y col. (2018), Difonzo y col. (2020) y Machado y col. (2020) por
mostrar dos grandes ventajas. La primera es la posibilidad de calcular los
ángulos entre las falanges y, por lo tanto,
la posición de la punta únicamente mediante el conocimiento del ángulo
de la barra fija con respecto a un marco de referencia, lo que permite que el
dedo completo sea actuado por un solo motor. La segunda hace referencia a la
fuerza, ya que, como se explica en Imbinto y
col. (2018), los dedos basados en mecanismos de cuatro barras son
capaces de generar mayor fuerza de agarre que los actuados por tendones, además
que estos últimos tienden a perder
movilidad, debido al estiramiento constante del tendón.
En cuanto a la teoría
de control, se observan una variedad de enfoques para modelar matemáticamente
los dedos, siendo el más común el empleo de modelos cinemáticos y ecuaciones de
Euler-Lagrange (Cortes, 2020), como puede
apreciarse en Yoon y Choi (2017), Kordaczek y Pilat (2020), Rondinò y col.
(2020) y Saharan y col. (2020).
La lista de proyectos
con diseños para dedos biónicos es extensa; no obstante, la mayoría se centran
únicamente en el diseño mecánico y en los movimientos que puede realizar,
dejando de lado la utilización de alguna técnica de control para manipular su posición.
Existen algunos proyectos como Deshpande y col. (2013), donde se menciona un
controlador proporcional integral derivativo (PID), mas no se hace referencia a
la forma en que se sintoniza. En Liu y col.
(2014) se indica que el diseño mostrado es controlado mediante un
dispositivo basado en un procesador de señales digitales (DSP, por sus siglas en inglés: digital signal processor), aunque no se
brinda más información sobre el mismo. Luo y col. (2014) presentaron un
controlador de impedancia de modos deslizantes a nivel de simulación, teniendo
como característica que los ángulos de las falanges se asumen conocidos y
controlables, lo que complica su implementación en un modelo real. Deng y col.
(2018) propuso el uso de un controlador PID difuso para determinar la fuerza de
agarre de una mano prostética, siendo uno de los pocos que abordan el problema
del control en este tipo de dispositivos. Con base en lo anterior, es posible
establecer que aún se requieren más estudios para satisfacer la necesidad de aplicar
teoría de control a una prótesis de mano.
El objetivo de este
trabajo fue evaluar el desempeño de cuatro controladores de lazo cerrado en el
funcionamiento estable de un dedo biónico específicamente adaptado, con el fin
de determinar cuál presenta el mejor control del sobreimpulso y las oscilaciones,
para su posible implementación en dispositivos biónicos destinados a prótesis
de mano.
MATERIALES Y MÉTODOS
Identificación
de falanges
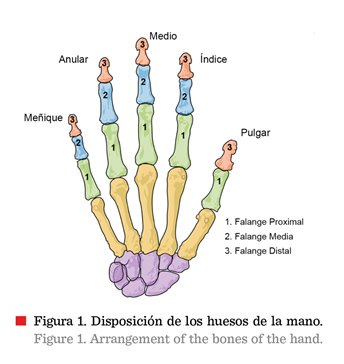
Se utilizó como modelo
de la mano humana la imagen propuesta por Velázquez-Velázquez y col. (2023)
(Figura 1). La mano humana se conforma de 27 huesos (Sobinov y Bensmaia, 2021). En los dedos se encuentran 14 de
ellos y son los que se consideraron para realizar el prototipo de prótesis. Se asignaron los nombres
correspondientes a cada una de las 3 falanges
que constituyen a los dedos índice, medio, anular y meñique y que son, a partir
de la base, Falange Proximal (FP), Falange Media (FM) y Falange Distal (FD); el
pulgar únicamente tiene dos, FP y FD.
Modelo
de dedo
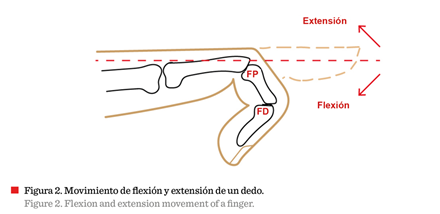
En el dedo
desarrollado, se tomó como base el movimiento que se muestra en la Figura 2,
mediante un mecanismo de cuatro barras (Lynch y Park, 2017), el cual es
ampliamente utilizado en sistemas de brazos robóticos, por ejemplo, en Wahit y
col. (2020) y Kim y col. (2021).
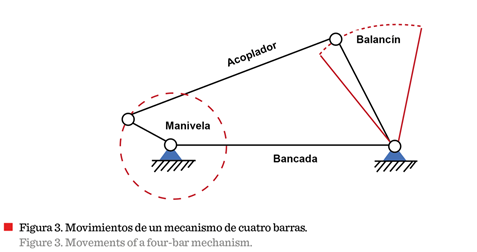
Mecanismo
de 4 barras
El mecanismo que
presenta los movimientos de manivela y balancín, que permiten la movilidad del
dedo, se muestra en la Figura 3. Para comprender más a fondo su utilidad, se definen
los siguientes conceptos:
• Bancada: eslabón que
se encuentra fijo al marco de referencia.
• Manivela: barra que
puede realizar una revolución completa y que se encuentra anclada a la bancada.
• Balancín: eslabón
que presenta movimiento oscilatorio, también llamada de vaivén y que se
encuentra ligado a la bancada.
• Acoplador: barra con
movimiento completo y no se encuentra enlazada a la bancada.
Una ventaja que
presentan estos mecanismos es la posibilidad
de saber los movimientos que podrán
realizar conociendo únicamente las longitudes de cada barra; al
respecto, se presenta el siguiente teorema, conocido como “Ley de Grashof”:
Teorema
1
(Grashof, 1883). Un mecanismo de cuatro barras, tiene al menos un movimiento de
manivela si el Criterio de Grashof se cum-ple
y presentará un doble balancín si (1) no se satisface:
s + l £ p + q (1)
Donde:
s =
eslabón de menor longitud
l =
eslabón de mayor longitud
p y q = eslabones de
longitud intermedia (no necesariamente iguales)
El movimiento
requerido para el dedo fue el de balancín (Figuras 2 y 3), por lo que se
establecieron las siguientes medidas para cada uno de los eslabones:
s = 7.071 mm
l = 37 mm
p = 10 mm
q = 25.015 mm
Esto permitió no
satisfacer el criterio de Grashof (1), ya que no fue mayor:
7.071 mm + 37 mm £ 10 mm + 25.015 mm
44.071 £ 35.015
lo que, de acuerdo con
el Teorema 1, implicó que el mecanismo propuesto tuviese el movimiento de
balancín deseado.
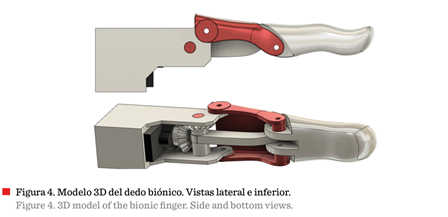
Diseño
3D del dedo
Se realizó utilizando
el programa para modelado en 3D Fusion 360 de Autodesk en su versión 2022, y posteriormente impreso en 3D empleando
ácido poliláctico (PLA, por sus siglas en inglés: polylactic acid). Su
estructura y forma se observan en la Figura 4.
Parámetros
de comparación
Debido a que no se
encontraron artículos en los que se realicen comparaciones sobre el desempeño
de controladores en dedos biónicos, para poder determinar qué controlador es el
ideal para este tipo de dispositivos se establecen las siguientes condiciones:
a. El
estado/sobreimpulso, fenómeno en el cual la respuesta de un sistema dinámico
excede su valor final deseado antes de estabilizarse (Nise, 2020), debe ser
mínimo, ya que las oscilaciones excesivas, en el movimiento del dedo, pueden
llevar a un agarre ineficiente de objetos. Un nivel adecuado de oscilaciones se
determina por la capacidad del dedo para
mantener un agarre estable y seguro. Minimizar estas oscilaciones es
crucial para asegurar un control preciso y una sujeción firme.
b. Las
oscilaciones en la señal de control, que son variaciones repetitivas e
indeseadas en la salida del controlador, deben ser mínimas. Estas oscilaciones
se manifiestan como vibraciones en el servomotor, lo que no solo afecta la
estabilidad y precisión del dispositivo, sino que también, con el tiempo, puede
causar un desgaste prematuro en los componentes mecánicos del mismo.
Se evaluó la
eficiencia de cada controlador determinando
el índice de desempeño de Error Integral Absoluto (IAE, por sus siglas
en inglés: integral absolute error,) para
ambas condiciones establecidas: a) el estado (sobreimpulso) y b) señal
de control (oscilaciones en el controlador). En ambos casos se considera que,
entre menor sea el valor calculado de este índice, mejor será el comportamiento
del controlador. De acuerdo con Nise (2020),
el IAE se define como:
donde e(t) es
la diferencia entre el valor obtenido y el esperado. El valor resultante de IAE
determina la magnitud general del error para cada condición.
Para calcular el
índice IAE en el caso del sobreimpulso, el error se determinó como la
diferencia entre la posición esperada y la posición real del dedo. En el caso
de las oscilaciones, el error se determinó como la diferencia entre la señal de
control esperada y la señal de control real
enviada al servomotor.
Modelo
matemático
El estado del sistema,
conjunto mínimo de variables que describen
completamente la condición de un sistema en cualquier instante de tiempo
(Nise, 2020), es la posición del dedo, la cual se infiere a partir de la
posición del servomotor que se encuentra conectado al mecanismo mediante un
juego de engranes (como puede apreciarse en la Figura 4). Debido a que el
estado debe estar disponible en cada instante de tiempo, el servomotor se
modificó para poder leer su posición en todo momento mediante un alambre conectado
al potenciómetro interno. Para simplificar la adquisición de datos se establece
una relación lineal entre ambas posiciones (servomotor y dedo), considerando que el servomotor
se encuentra en el rango [00 a 1800] y el dedo en [00
a 700].
Debido a que el
actuador es un servomotor, es necesario generar una señal Modulada por Ancho de
Pulso (PWM, por sus siglas en inglés: Pulse Width Modulation) para controlarlo,
la cual se encuentra en el rango de operación [500 ms a 2 500 ms], sin embargo,
manipular el servomotor directamente con
estos valores genera demasiada vibración, por lo que se propone una
conversión lineal hacia el rango [0 a 800] unidades, siendo esta la señal de
control que se utiliza en las pruebas posteriores.
Para realizar la
adquisición de datos se utilizó el microcontrolador ESP32, modelo
ESP32-WROOM-32D, de la marca Espressif Systems (Shanghai, China) y cuya hoja de especificaciones técnicas se puede
consultar en Espressif (2022).
La medición del
comportamiento de cada uno de los controladores descritos, tanto en simulación
como directo en el dedo (real), se realizó de acuerdo al seguimiento de una
trayectoria predefinida r(t), la cual consistió en un ciclo de movimiento de 0°
a 180°, manteniéndose en 180° brevemente antes de retornar a 0°, repitiendo
este ciclo tres veces con una duración aproximada de 10 s por ciclo, resultando
en un experimento total de 30 s. Cada prueba
se realizó 10 veces para cada controlador.
Algoritmo
de Mínimos Cuadrados Ordinarios para la identificación de los parámetros del
sistema
Se utilizó el
algoritmo de mínimos cuadrados ordinarios
(MCO) para obtener el modelo matemático
de una planta (Wellstead y Zarrop, 1991), el cual es un proceso de
regresión lineal que consiste en obtener la línea que aproxima mejor un
conjunto de datos; es adecuado cuando únicamente se tiene acceso a los valores
de entrada y de salida de un proceso. No siempre es posible obtener una
aproximación efectiva mediante una única línea (ya que en la realidad, la
mayoría de los procesos no son completamente lineales), sin embargo, el
algoritmo de MCO puede realizar generalizaciones importantes, lo que permite
que, en lugar de obtener una única línea, se obtenga la mejor aproximación dada por cualquier cantidad finita de combinaciones
lineales de diversas funciones.
El
algoritmo de MCO resuelve el problema de encontrar los coeficientes:
a1, a2, ..., an,
dadas
las funciones:
f1(x), f2(x),
..., fn(x),
de
forma tal que, la combinación lineal propuesta:
y = a1 f1(x)
+ a2 f2(x) + ¼ + anfn(x)
es
la mejor aproximación a los datos (Farebrother, 2018).
Siguiendo el algoritmo
de MCO, lo primero es proponer las funciones cuyos coeficientes se pretende
encontrar y no existe ninguna regla sobre el número y la forma que deben tener
dichas funciones, por lo que es posible partir de un conjunto básico e ir incrementándolo
de forma heurística hasta obtener el resultado esperado. Debido a que el
sistema que se pretende aproximar es la posición de un motor, se propuso el
modelo:
x(t) = -ax(t) +but(t) (2)
y(t) = x(t)
Donde:
x(t) = la posición del motor (estado)
a y b = parámetros a estimar
u(t) = la entrada (control)
y(t) = la salida del sistema.
De acuerdo con el
método propuesto en Wellstead y Zarrop (1991), discretizando mediante el método
de Euler hacia adelante se tiene:
De acuerdo con el
algoritmo de MCO, el sistema se puede
representar como:
![]()
con el vector de
regresión con variables medidas ![]() y el vector de parámetros
desconocidos
y el vector de parámetros
desconocidos ![]() , por lo que el vector de estimación de parámetros MCO es:
, por lo que el vector de estimación de parámetros MCO es:
![]()
Finalmente,
los parámetros originales de la ecuación propuesta son:
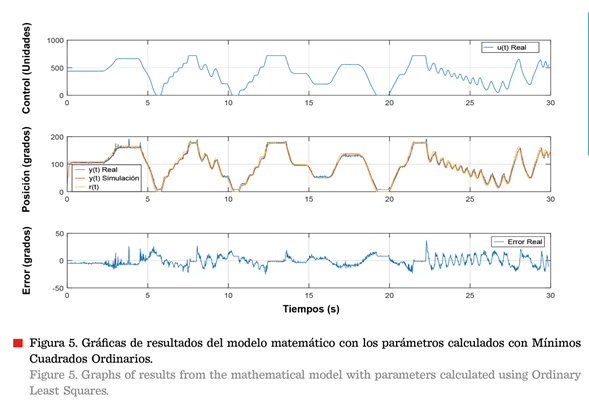
Considerando
un tiempo de muestreo T = 20 ms, se obtuvieron los
valores de entrada y salida de la planta y se realizó el cálculo de parámetros,
obteniendo a = 17.357 3 y b = 4.235 7.
La Figura 5 muestra
los valores de entrada introducidos a la planta (gráfico de arriba), la
validación del modelo, con los valores de salida tanto reales como simulados y
la referencia deseada (gráfico de en medio) y el error entre la referencia deseada y la salida real (gráfico de abajo). Se puede
observar que los valores del modelo matemático se aproximan correctamente a los de la planta, por lo que se considera
que los parámetros calculados son válidos para los experimentos posteriores.
Controladores
Se
eligieron cuatro leyes de control para probar el dedo biónico, con base a su
compatibilidad con el diseño de la planta y su facilidad de implementación, lo
que permitió evaluar su desempeño de manera clara y eficiente, facilitando la
comparación de resultados.
Control proporcional
más compensación
Se
considera un control realimentado para el sistema (2) de la forma u(t)
= Kpe(t) + ub (Astrom y
Hägglund, 2006). Definiendo el error como e(t) = y(t)
-Xd, se obtiene:
Donde
Xd =
referencia deseada
e(t) = error
entre la salida y la referencia
Kp =
ganancia proporcional del controlador
ub =
valor de compensación
Estableciendo
el polo del sistema deseado en - 28 se obtiene una ganancia Kp=
-2.512 6 y una compensación ub
= 4.097 9Xd.
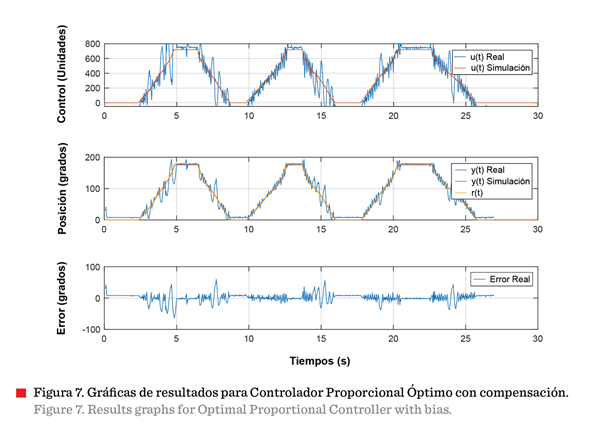
Control proporcional
óptimo más compensación
La
técnica del Regulador Lineal Cuadrático (LQR, por sus siglas en inglés: Linear
Quadratic Regulator), tiene como objetivo minimizar el índice de desempeño
(Lewis y col., 2012) para el sistema (2):
Donde: Q y R
son valores de penalización propuestos que condicionan el desempeño del estado x(t)
y la señal de control u(t), respectivamente.
De acuerdo con el
trabajo presentado en Lewis y col. (2012) se sabe que, la señal de control que
cumple el objetivo de LQR es u(t) = Kx(T),
donde K = -R-1 BT P es la ganancia
proporcional y P es la solución de la ecuación de Ricatti
AT P + PA- PBR-1 BT + Q = 0.
Es importante recordar
que el sistema (2) es escalar, por lo que
las matrices A y B son en realidad los
coeficientes a y b obtenidos previamente mediante MCO.
Para obtener la K,
se proponen los valores Q = 3 y R = 10 y mediante el comando “lqr” del programa MatLab R2017b
se obtiene que K = 8.232 2. Para el valor de compensación se utiliza el
calculado en el Método 2.
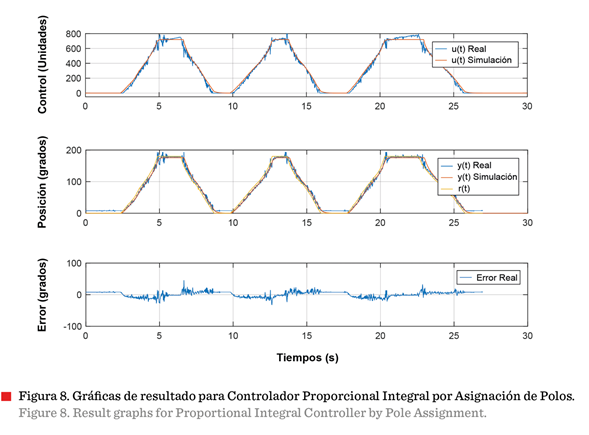
Control
proporcional integral por asignación de polos
Para el sistema (2),
la ecuación característica con un control Proporcional Óptimo (Astrom y
Hägglund, 2006) es:

Se propone la ecuación
deseada Pd(s) = s2 + 33 s + 130, igualando los coeficientes de ambas ecuaciones se
obtienen los valores de las ganancias:

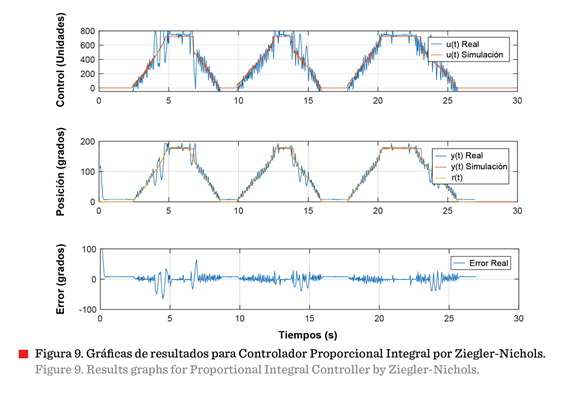
Controlador
proporcional integral por Ziegler-Nichols
Para
el sistema (2), el método de sintonización Ziegler-Nichols
(Astrom y Hägglund, 2006) establece las ecuaciones:
Donde:
Este
método considera un sistema con retardo, por lo que se propone L = 0.01.
Realizando las operaciones indicadas, se obtienen los valores
de las ganancias del controlador Kp
= 21.245 9 y ti = 0.033 3.
RESULTADOS Y DISCUSIÓN
Las
Figuras 6 a 9, muestran el mismo conjunto de información correspondiente a cada
uno de los controladores considerados en uno de los experimentos realizados.
Para todos los casos se puede ver, en la gráfica de arriba, la señal de control
u(t) (real y simulada), mientras que en la de en medio se observa la posición
del dedo y(t) (real y simulada) y la forma en la que se ajustan a la
referencia predeterminada r(t). Por último, en
la gráfica de abajo, se muestra el error entre la posición real del dedo
y la referencia.
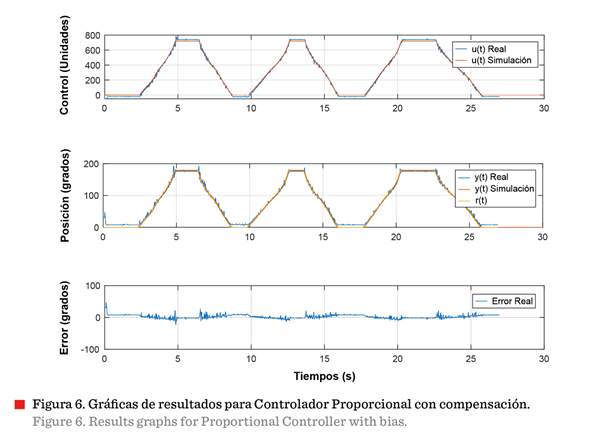
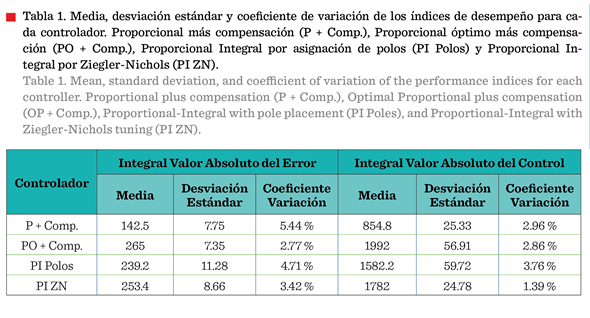
El sobre impulso en el
dedo (Tabla 1), determinado por la integral del valor absoluto del error, es
aproximadamente el mismo para todos los
controladores; no obstante, las diferencias se vuelven más evidentes en
las oscilaciones de la señal de control. En este aspecto, el control proporcional más compensación es el que presenta menos oscilaciones,
lo que implica un menor impacto en el actuador.
Por lo tanto, este controlador, en conjunto, muestra el mejor desempeño de los
cuatro evaluados, ya que presenta los
valores más bajos en ambos índices de desempeño. Dado que el coeficiente
de variación es pequeño, se considera que los
resultados obtenidos son estadísticamente representativos.
El desempeño de cuatro
controladores de realimentación de estado en un dedo biónico no ha sido
abordado en la literatura científica actual. Aunque existen investigaciones
sobre el control de dedos biónicos, estas se han centrado en controladores específicos como el PD (Prakash y
Sharma, 2020), Impedancia por modos
deslizantes (Luo y col., 2014) e incluso on-off
(Tchimino y col., 2021), todos con la intención de
mejorar el agarre de una mano biónica, pero sin realizar una comparación entre diferentes controladores. Aún, cuando
hay una amplia variedad de controladores documentados en la literatura, para
esta primera comparativa en un dedo biónico se eligieron cuatro de los más
comunes. Estos controladores fueron seleccionados porque han demostrado ser
eficaces en una variedad de aplicaciones y
se consideran opciones versátiles en el ámbito del control de sistemas
(Franklin y col., 2019).
El hecho de que el
controlador, en apariencia, más simple de todos, sea el que presenta los
mejores resultados, genera una nueva serie de preguntas que, como trabajo
futuro se pretenden responder, algunas de las cuales son, ¿el rendimiento se
mantendrá cuando se analice una mano con
todos los dedos funcionando en paralelo?, ¿cómo se comportará la mano ante perturbaciones externas?, ¿cuál será
el consumo de energía de cada controlador, de cara a considerar que este
dispositivo debe operar con baterías?, entre otras; sin embargo, lo que si
puede afirmarse es que es este tipo de comparaciones son indispensables con
miras a generar dispositivos que puedan competir con los que existen
actualmente en el mercado, basado en dispositivos biónicos que utilizan controles
en lazo abierto y operan mediante señales mioeléctricas (SEMG) (Song y
col., 2023), no solo en costo, sino también en funcionamiento.
CONCLUSIONES
El controlador
proporcional más compensación fue el que mejor desempeño presentó en las
pruebas realizadas al mostrar una menor incidencia
de sobre impulso y oscilaciones en la señal de control en comparación
con los otros evaluados, lo que lo convierte en la opción más adecuada para el
funcionamiento estable de un dedo biónico.
Estos resultados sugieren que el controlador proporcional más
compensación es una alternativa viable para su implementación en dispositivos
biónicos, especialmente en prótesis de mano,
debido a su precisión y capacidad para minimizar el desgaste del
actuador. La tendencia actual en dispositivos biónicos del control en lazo
abierto mediante SEMG abre la posibilidad de integrar señales EMG como
referencia para un controlador en lazo cerrado, permitiendo un control más
intuitivo y adaptativo del movimiento del dedo biónico hacia la posición
deseada. La combinación de controladores de lazo cerrado con señales EMG podría
aumentar la funcionalidad y precisión de las prótesis. Finalmente, los resultados obtenidos no solo proporcionan un sólido
punto de partida para futuras comparaciones
de controladores, sino que también destacan
el potencial de seguir investigando en
la integración del control por señales mioeléctricas. La investigación
futura podría centrarse en optimizar esta
combinación de controladores para mejorar aún más la capacidad de las
prótesis biónicas y aumentar la calidad de vida
de las personas con amputaciones de miembros superiores.
Declaración de conflicto de
intereses
Los
autores declararon no tener conflictos de intereses de ningún tipo.
Referencias
Astrom, K. J. & Hägglund,
T. (2006). PID
control. IEEE Control Systems Magazine.
Bioparx (2018). Bioparx.
[En línea]. Disponible en: http://www.bioparx.com/. Fecha de consulta: 3 de
octubre de 2022.
Burton, D. (2016). Robotic or prosthetic hand. [En línea]. Disponible en: https://www.thingiverse.com/thing:1830958.
Fecha de consulta: 3 de octubre de 2022.
Cortes,
F. R. (2020). Robótica: control de robots manipuladores. Marcombo.
Deng, H., Luo, H., Wang, R., & Zhang, Y. (2018). Grasping force
planning and control for tendon-driven anthropomorphic prosthetic hands. Journal
of Bionic Engineering, 15(5), 795-804. https://doi.org/10.1007/s42235-018-0067-z
Deshpande, A. D., Ko, J., Fox, D., & Matsuoka, Y. (2013). Control
strategies for the index finger of a tendon-driven hand. The International
Journal of Robotics Research, 32(1), 115-128. https://doi.org/10.1177/0278364912466925
Difonzo, E., Zappatore, G., Mantriota,
G., & Reina, G. (2020). Advances in finger and partial hand prosthetic
mechanisms. Robotics, 9(4), 80. https://doi.org/10.3390/robotics9040080
Dougherty, D. (2012). The maker movement. Innovations: Technology, Governance, Globalization, (3), 11-14. https://muse.jhu.edu/article/499244
Duran, L. (2019). Prototype for the “LAD” Robotic Hand-finger. [En línea]. Disponible en: https://www.thingiverse.com/thing:3742369.
Fecha de consulta: 10 de noviembre de 2022.
Espressif (2022). Espressif
Systems. [En línea]. Disponible en:
https://www.espressif.com/sites/default/files/documentation/esp32_datasheet_en.pdf.
Fecha de consulta: 17 de agosto de 2022.
Farebrother, R. W. (2018). Linear least squares computations. Routledge.
Franklin, G. F., Powell, D., & Emami-Naeini, A. F. (2019). Feedback
Control of Dynamic Systems. Pearson.
Grashof, F. (1883). Theoretische Mashinenlehre.
Leipzig.
Gross, R. (2017). Humanoid robotic hand. [En línea]. Disponible
en: https://www.thingiverse.com/thing:2269115. Fecha de consulta: 3 de octubre
de 2022.
Imbinto, I., Montagnani, F., Bacchereti,
M., Cipriani, C., Davalli,
A., Sacchetti, R., Gruppioni, E., Castellano, S.,
& Controzzi, M. (2018). The S-Finger: a synergetic externally powered digit with tactile
sensing and feedback. IEEE Transactions on Neural Systems and
Rehabilitation Engineering, 26(6), 1264-1271. https://doi.org/10.1109/TNSRE.2018.2829183
Jang, G., Lee, C., Lee, H., & Choi, Y. (2013). Robotic index finger
prosthesis using stackable double 4-BAR mechanisms. Mechatronics, 23(3),
318-325. https://doi.org/10.1016/j.mechatronics.2013.01.006
Jung, S. Y., Kang, S. K., & Moon, I. (2008). Design of biomimetic
hand prosthesis with tendon-driven five fingers. IEEE.
Kashef, S. R., Amini, S., & Akbarzadeh, A. (2020). Robotic hand: A
review on linkage-driven finger mechanisms of prosthetic hands and evaluation
of the performance criteria. Mechanism and Machine Theory, 145, 103677. https://doi.org/10.1016/j.mechmachtheory.2019.103677
Kim, U., Jung, D., Jeong, H., Park, J., Jung, H. M., Cheong, J., Choi,
H. R., Do, H., & Park, C. (2021). Integrated linkage-driven dexterous
anthropomorphic robotic hand. Nature Communications, 12(1),
1-13. https://doi.org/10.1038/s41467-021-27261-0
Kordaczek, R. & Pilat, A. K. (2020). Prototype and Simulation Model of a
Robotic Hand. International Conference
Mechatronic Systems and Materials, 1-6.
https://doi.org/10.1109/MSM49833.2020.9201741
Lewis, F.
L., Vrabie, D., & Syrmos,
V. L. (2012). Optimal Control. John Wiley & Sons. https://doi.org/10.1002/9781118122631
Li, X., Huang, Q., Chen, X., Yu, Z., Zhu, J., & Han, J. (2017). A
novel under-actuated bionic hand and its grasping
stability analysis. Advances in Mechanical Engineering,
9(2), 1687814016688859. https://doi.org/10.1177/1687814016688859
Liu, Y. W., Feng, F., & Gao, Y. F. (2014). HIT prosthetic hand based on tendon-driven mechanism.
Journal of Central South University, 21(5), 1778-1791. https://doi.org/10.1007/s11771-014-2124-z
Luo, H., Duan, X., & Deng, H. (2014). Sliding mode impedance control
of a underactuated prosthetic hand. IEEE, 2014. IEEE International Conference
on Information and Automation. https://doi.org/10.1109/ICInfA.2014.6932747
Lynch y Park. (2017). Modern robotics. Cambridge University Press.
Machado,
B., Quintero, E., Safla, E., & Armijos, A.
(2020). Síntesis dimensional de mecanismo para una mano robótica basado en un
eslabonamiento de cuatro barras. Polo del
Conocimiento: Revista Científico-Profesional, 5(12), 707-724.
Nise, N. S. (2020). Control systems engineering. John Wiley & Sons.
Open Bionics (2017). Ada Robotic Hand. [En línea].
Disponible en: https://www.thingiverse.com/thing:1294517. Fecha de consulta: 3
de octubre de 2022.
Open Bionics (2021). Open bionics. [En
línea]. Disponible en: https://openbionics.com. Fecha de consulta: 3 de octubre
de 2022.
Ottobock (2013). Prótesis de Miembro Superior. [En línea]. Disponible en:
https://www.ottobock.com.mx/prosthetics/upper-limb/. Fecha de consulta:
3 de octubre de 2022.
P4HBionics (2020). P4H Bionics.
[En línea]. Disponible en: https://p4hbionics.com. Fecha
de consulta: 3 de octubre de 2022.
Prakash, A. & Sharma, S. (2020). A low-cost system to control prehension force of a custom-made myoelectric hand
prosthesis. Research on Biomedical Engineering, 36, 237-247.
Rondinò, S., Pisla, D., & Carbone, G. (2020).
Design, simulation and preliminary testing of a robotic hand with a one-DOF
movable palm. https://doi.org/10.1109/AQTR49680.2020.9129962
Saharan, L., Wu, L., & Tadesse,
Y. (2020). Modeling and simulation of robotic
finger powered by nylon artificial muscles. Journal of Mechanisms and
Robotics, 12(1), 014501. https://doi.org/10.1115/1.4044740
Sobinov, A. R. & Bensmaia, S. J. (2021). The neural mechanisms of manual dexterity. Nature
Reviews Neuroscience, 22(12), 741-757. https://doi.org/10.1038/s41583-021-00528-7
Song, T., Yan, Z., Guo, S., Li,
Y., Li, X., & Xi, F. (2023). Review of sEMG for robot control: Techniques and applications. Applied
Sciences, 13(17), 9546.
Tchimino, J., Markovic, M., Dideriksen, J. L., & Dosen, S. (2021). The
effect of calibration parameters on the control of a myoelectric hand
prosthesis using EMG feedback. Journal of Neural Engineering, 18(4),
046091. https://doi.org/10.1088/1741-2552/ac07be
Vazquez-Vela, E. (2016). Los amputados y su rehabilitación. Un
reto para el Estado. Academia Nacional de Medicina.
Velázquez-Velázquez, E., Doroteo-Chimal, C., Diaz-Arizmendi,
L. J. y Suárez-Benítez, M. C. (2023). Estadios de maduración ósea digitopalmar en pacientes de la Clínica de Ortodoncia de la
Universidad de Ixtlahuaca en comparación a
los criterios establecidos por Björk, Grave y
Brown, agosto 2016-julio 2018. Revista Mexicana de Ortodoncia, 8(4),
236-244.
Wahit,
M. A., Ahmad, S. A., Marhaban, M. H., Wada, C., & Izhar, L. I. (2020). 3D printed
robot hand structure using four-bar
linkage mechanism for prosthetic application. Sensors,
20(15), 4174. https://doi.org/10.3390/s20154174
Wellstead, P. E. E. & Zarrop, M. B. (1991).
Self-tuning Systems: Control and Signal Processing. West Sussex: John Wiley
& Sons.
Winkley (1888). The winkley company. [En línea]. Disponible en: https://www.winkley.com. Fecha de consulta: 10
de noviembre de 2022.
Yoon, C. y Choi, D. (2017). Underactuated finger mechanism using contractible slider-cranks and stackable
four-bar linkages. IEEE/ASME Transactions on Mechatronics, 22(5),
2046-2057. https://doi.org/10.1109/TMECH.2017.2723718