https://doi.org/10.29059/cienciauat.v20i1.1983
Algoritmo de marcado de agua robusto:
autenticación de imágenes mediante redes neuronales siamesas y características
híbridas espacio-frecuencia
Robust zero-watermarking
algorithm for image authentication using hybrid spatial-frequency features and
siamese neural
networks
Redes neuronales
siamesas para autenticar imágenes
Rodrigo Eduardo Arevalo-Ancona, Eduardo Fragoso-Navarro, Manuel
Cedillo-Hernández*
*Correspondencia:
mcedilloh@ipn.mx/Fecha de recepción: 17 de enero de 2025/Fecha de aceptación:
27 de junio de 2025/Fecha de publicación: 18 de agosto de 2025
Instituto Politécnico
Nacional, Escuela Superior de Ingeniería Mecánica y Eléctrica, Unidad
Culhuacán, Sección de Estudios de Posgrado e Investigación, avenida Sta. Ana,
núm. 1000, San Francisco Culhuacán, Culhuacán CTM V, Coyoacán, Ciudad de
México, México, C. P. 04440.
RESUMEN
El uso y distribución de
archivos digitales, impulsado por los avances en las tecnologías de la
información, ha generado la necesidad de desarrollar sistemas para la
protección de los derechos de autor. En el contexto de las imágenes digitales,
es fundamental minimizar los riesgos de
seguridad asociados con la distribución no autorizada y garantizar la integridad de la información visual. El
objetivo de este trabajo fue desarrollar un algoritmo de marcado de agua libre
de distorsiones, diseñado para la autenticación de la propiedad del usuario y
la recuperación de imágenes originales en escala de grises en caso de su
manipulación. El método propuesto utilizó una red neuronal siamesa con una
arquitectura de dos ramas: una que aprende características frecuenciales a
partir de los coeficientes de la transformada de wavelet discreta y otra que
extrae características espaciales de la otra imagen. Adicionalmente, se integró
una red neuronal entrenada con características espaciales para reconstruir una
versión en escala de grises de la imagen original, natural a color, tras una
manipulación. El método propuesto demostró su eficacia en los tiempos de
procesamiento, precisión y proceso de recuperación de la marca de agua para la
verificación de la propiedad del usuario y la autenticación de imágenes
manipuladas. Destacando sus mejoras de robustez, frente a distorsiones
geométricas como rotación, traslación, transformación, afín, recorte y
escalado, así como la combinación de algunas distorsiones. El autoencoder entrenado conserva una alta fidelidad en la
reconstrucción de imágenes en escala de grises, alteradas por manipulaciones
combinadas con otras distorsiones, por lo que demostró ser una solución eficaz
para la autenticación y protección de los derechos de autor en imágenes
digitales.
PALABRAS
CLAVE: marcado de agua libre de distorsiones, aprendizaje profundo, red
neuronal siamesa, autenticación de propietario, seguridad en imágenes.
ABSTRACT
The use
and distribution of digital files has increased due to advancements in
information technologies. This has created the need for the development of copyright protection systems. In
the context of digital images, it is essential to minimize security risks
associated with unauthorized distribution and ensure the integrity of visual
information. The objective of this paper was to develop a robust
zero-watermarking algorithm designed for user
ownership verification and the recovery of original images in grayscales in cases of manipulation. The proposed
method employed a Siamese neural network
with a architecture model consisted of two
branches: one learns frequency-domain features from discrete wavelet transform coefficients, and other
that extract spatial features from the other
image. Additionally, a neural network
trained with spatial features was used to reconstruct a grayscale version of the original image after
tampering. The proposed method proved its
using natural color images demonstrated the high effectiveness in processing times, precision and of the
watermark recovery process for verifying user ownership and accurately
authenticating manipulated images. Highlighted its improvements robustness when encountering geometrical
distortions such as rotation, translation, transformation, affine, clipping and scaling, as well as the combination
of some distortions. The trained
autoencoder preserves high fidelity in grayscale
image reconstruction that has suffered alterations
by combining manipulations with other distortions. The proposed
algorithm proved to be an effective solution for the authentication and
protection of copyright in digital images.
KEYWORDS: zero-watermarking, deep learning, siamese neural
network, ownership authentication, image security.

INTRODUCCIÓN
Los
avances recientes en las tecnologías de la información han provocado un notable
aumento en la creación y distribución de archivos digitales, especialmente
imágenes digitales (Ikbal y Gopikakamari,
2022). Esta creciente demanda ha generado la necesidad de desarrollar
soluciones eficaces para proteger, preservar
y verificar la autenticidad de las imágenes (Shamia
y col., 2023). Por esta razón, se han desarrollado técnicas de marcado de agua para proteger las imágenes digitales y evitar
falsificaciones o usos no autorizados (Amini y col., 2018; Wu y col.,
2020).
Las
marcas de agua utilizadas contienen información derivada de la imagen o del
propietario, permitiendo identificar su propiedad (Lee y col., 2019; Liu y
col., 2020; Shang y col., 2023). Las metodologías convencionales insertan una
señal en la imagen para proteger su
propiedad intelectual, pero generan distorsiones que afectan su calidad
visual (Gong y col., 2022). Para solucionar esta limitación, se han
desarrollado algoritmos de marcado de agua libre de distorsiones.
Los
métodos libres de distorsiones emplean un componente adicional, el código de
usuario, que permite autenticar la imagen sin modificarla ni comprometer su
calidad visual. Este código se almacena y se genera asociando características
de la imagen con una marca de agua binaria mediante una operación lógica (Liu y Zhang. 2021). Durante la autenticación,
el código de usuario se combina con las características de la imagen, para
recuperar la marca de agua, garantizando la autenticación
de la propiedad (Dong y col., 2023b; Khafaga y
col., 2023).
Zhang
(2021) presentó un sistema libre de distorsiones utilizando el coeficiente DC
de la transformada discreta del coseno (DCT, por sus siglas en inglés: discrete
cosine transform) para
generar una matriz de características. El uso de características frecuenciales
(asociadas con la distribución de la intensidad de pixeles) mejora la robustez
del sistema ante distorsiones geométricas. Posteriormente, utiliza el algoritmo
de descomposición en valores singulares (SVD, por sus siglas en inglés:
singular vector decomposition), para extraer las
características de la imagen. Este método garantiza la extracción de
características robustas. Li y col. (2023b) propusieron un algoritmo para
imágenes médicas, combinando los algoritmos
del descriptor de orientación y rotación (ORB, por sus siglas en inglés: oriented fast and rotated brief) y DCT para crear
una matriz de características y fusionarla con una marca de agua encriptada.
Esta técnica identifica características locales y globales de la imagen.
La
integración de modelos de aprendizaje profundo en los sistemas de marcado de
agua mejora la robustez al identificar características únicas de la imagen,
incluso cuando la imagen tenga distorsiones como transformaciones geométricas o
procesamiento (Zhong y Shih,
2019; Jing, 2020; Solorzano y Tsai, 2023).
Las redes
neuronales aprenden patrones complejos de las imágenes, lo que permite
autenticarlas incluso después de haber sufrido diversas modificaciones. Han y
col. (2021) utilizaron un modelo preentrenado de
VGG19 para extraer los mapas de características, en el que, posteriormente,
aplicaron la transformada discreta de Fourier (DFT, por sus siglas en inglés:
discrete Fourier transform). El uso de DFT mejoró la robustez frente a manipulaciones geométricas. Darwish
y col. (2023) desarrollaron un método usando las características extraídas de
la imagen mediante la red neuronal VGG19. Huang y col. (2023) emplearon el modelo VGG
para construir una matriz de características, utilizada para la protección de la imagen, resaltando las características detectadas.
Gong y col. (2022) obtuvieron los mapas de
características del modelo residual DenseNet, los
cuales combinaron con los coeficientes de la DCT. El uso de un modelo DenseNet ayudó a identificar características de datos no
vistos. Dong y col. (2023a) propusieron un
sistema basado en NasNet Mobile, al que
añadieron una capa de regresión en lugar de la capa de clasificación para
obtener 128 características, a las cuales
se aplicó DCT. Xiang y col. (2023) emplearon un modelo neuronal ResNet como extractor de características. La red neuronal
se entrena con características de diferentes filtros aplicados a la imagen. A
pesar de la efectividad de los métodos de aprendizaje profundo para extraer
características robustas, la mayoría de los métodos se enfocan en distorsiones geométricas o de procesamiento de señales.
El
objetivo del presente trabajo fue desarrollar un sistema para la recuperación
de imágenes en escala de grises, con el fin de determinar si la imagen ha sido
distorsionada y autenticar al propietario, basado en un algoritmo de marcado de
agua libre de distorsiones que utiliza una red neuronal siamesa como extractor
de características.
MATERIALES Y MÉTODOS
Se utilizó el conjunto de datos pertenecientes a MICC-F220
(Amerini y col., 2011) para entrenar y validar la
autenticación de usuario; y se empleó el conjunto COCO 2017 por su diversidad
de imágenes para evaluar la reconstrucción de la imagen (Lin y col., 2015). Se
utilizó un código QR de 512 × 512 pixeles como marca de agua. El algoritmo se
implementó en una computadora Alienware M16 R2 (marca registrada de Dell, Round Rock, Texas, Estados Unidos) con un sistema con GPU
NVIDIA GTX 4050 y un procesador Intel Core Ultra 7 155H (1.4 GHz) con Windows
11, usando Pytorch versión 2.4.1. El equipo fue fabricado en China o México,
dependiendo de la planta de producción.
El método propuesto se dividió en cinco etapas:
1. Preprocesamiento de la imagen. Se aplicó aumento de
datos a la rama espacial y transformada discreta de wavelet (DWT, por sus
siglas en inglés: discrete wavelet transform) para
obtener los coeficientes de frecuencia baja (LL, por sus siglas en inglés: low-low). Se redimensionó la imagen a una dimensión de 128
x 128 pixeles para asegurar compatibilidad con la red neuronal siamesa de dos
ramas, que procesa características espaciales y frecuenciales.
2. Entrenamiento de la red neuronal. La red aprendió
patrones invariantes en las características espaciales y frecuenciales. La
combinación de ambas ramas creó una matriz de características.
3. Generación del código de usuario. Se creó la matriz de
características y se vinculó lógicamente con la marca de agua, para verificar
al usuario de manera eficaz.
4. Recuperación de la marca de agua. La red neuronal
extrajo la matriz de características de la imagen distorsionada, y al
combinarla con el código de usuario, se recuperó la marca de agua, incluso en
imágenes manipuladas.
5.
Reconstrucción de imagen sin distorsiones. Se
utilizó una red neuronal artificial que aprendió a comprimir y reconstruir
datos de entrada denominada autoencoder, para
reconstruir la imagen distorsionada en escala de grises, verificando su
autenticidad.
Preprocesamiento de las imágenes
En esta etapa, se aplicaron dos procesamientos de imágenes
para generar las entradas para cada rama de la red neuronal. Primero, se
realizó un proceso de aumento de datos para introducir distorsiones geométricas
y de procesamiento de imágenes a las imágenes originales 0k
del conjunto de datos, donde k = 0, …, L, generando versiones
modificadas Ak, permitiendo
detectar características invariantes, mejorando su capacidad para aprender
representaciones robustas.
Las técnicas de aumento de datos empleadas incluyen:
rotaciones de imágenes de 0° a 360°, con incrementos de 15°. Traslaciones de
imágenes en el eje x, eje y, o ambos, con desplazamientos que van de 10 a 150
pixeles en pasos de 20 pixeles. Escalado de imágenes a dimensiones de 64 x 64,
128 x 128, 512 x 512 y 1 024 x 1 024 pixeles. Recorte de imágenes desde las
esquinas y el centro, con tamaños de 50 x 50, 100 x 100 y 150 x 150 pixeles.
Aplicación de diferentes filtros, incluyendo filtros promedio, filtros gaussianos,
filtros medianos y desenfoque, con tamaños de núcleo de 5 x 5, 7 x 7 y 11 x 11
pixeles. Introducción de ruido sal y pimienta con densidades del 5 %, 9 % y 15 %. Compresión JPEG con
factores de calidad de imagen de 30, 50, 70 y 90 pixeles.
Posteriormente,
se aplicó el primer nivel de DWT para
extraer los coeficientes de frecuencia LL, denotados como Fk. Estos coeficientes se seleccionan
porque contienen información de baja frecuencia, y permiten eliminar características redundantes, así como ruido que contenga
la imagen, lo cual aumenta la robustez frente a distorsiones, como compresión,
transformaciones geométricas y adición de ruido. Las imágenes Fk y Ak
se redimensionaron a un tamaño estandarizado de 128 x 128 pixeles. Este
redimensionamiento garantiza dimensiones de entrada consistentes, simplificando
el entrenamiento de la red neuronal y la estructura de los datos.
La
incorporación de los coeficientes LL de la DWT en el entrenamiento de la red
neuronal garantizó una recuperación precisa de la marca de agua para la autenticación de propiedad, incluso
cuando la imagen ha sido distorsionada. Al integrar estos coeficientes, se
estableció una relación estable entre las características espaciales y
frecuenciales de la imagen. Dicha relación permite a la red neuronal
identificar patrones invariantes, para la creación de una matriz de
características que se mantiene similar tanto cuando la imagen está intacta
como cuando está distorsionada, lo que asegura la precisión en la recuperación
de la marca de agua y la verificación de la propiedad. La siguiente fase
consistió en entrenar la red neuronal utilizando tanto las imágenes Ak como los coeficientes Fk.
Entrenamiento de la red neuronal
En esta etapa, la red neuronal aprende patrones
invariantes a partir de los datos. En el contexto del marcado de agua libre de
distorsiones, las redes neuronales siamesas son utilizadas como un extractor de
características, que son cruciales para crear el código de usuario y autenticar
la imagen (Arevalo-Ancona y col., 2024).
La red
neuronal siamesa AlexNet consta de dos ramas
idénticas con los mismos parámetros, y está diseñada para aprender la
correlación de patrones entre la imagen original y la imagen distorsionada, lo
que permite identificar patrones comunes entre las entradas (Vizváry y col., 2019; Wiggers y
col., 2019; Aydemir y col., 2022; Li y col., 2023a).
El
extractor de características basado en la red neuronal siamesa se entrena
utilizando una función de pérdida contrastiva CLoss.
Esta función de pérdida permite a la red neuronal
aprender representaciones invariantes de las imágenes de entrada, que
son esenciales para construir matrices de características similares tanto para las imágenes originales como
para las distorsionadas. La pérdida contrastiva minimiza la distancia entre los
vectores de salida, asegurando que sus representaciones permanezcan similares a
pesar de las distorsiones. Al mismo tiempo, maximiza la distancia entre pares
de imágenes disímiles, para distinguir entre características no relacionadas
(Ye y col., 2025). Esta función de pérdida permite a la red neuronal aprender
una representación semántica de las imágenes al capturar efectivamente patrones
similares de los coeficientes derivados mediante la DWT y las características
espaciales.
La CLoss se define como (1):

Donde:
N = el
lote de imágenes
y = valor
de la característica analizada
yk= 0 cuando Ak (imagen) está distorsionada
yk = 1 cuando Ak (imagen) no ha sido modificada
El
término m (m = 2) define la distancia mínima d (2) entre
los vectores de salida: Vout1 y Vout2.
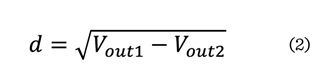
Donde:
Vout1 y Vout2 = vectores de salidas de la
red neuronal siamesa
Para
reforzar la autenticación de imágenes distorsionadas, se utilizó un autoencoder para reconstruir la imagen sin distorsiones en
escala de grises. Su codificador comparte la arquitectura
de la rama espacial de la red siamesa, proporcionando características invariantes y consistentes. El decodificador,
mediante convoluciones transpuestas, reconstruyó una imagen similar a la
original. Este diseño optimizó la
eficiencia computacional mejorando la reconstrucción de las imágenes
distorsionadas.
Las imágenes Ak se utilizaron como entrada para el autoencoder,
donde el codificador comprimió estas imágenes en una representación latente y
el decodificador generó la imagen reconstruida. Para lograr un aprendizaje
robusto del espacio latente, se incorporó una reparametrización
(3):

Donde:
rz= espacio latente
e =
salida
m = media
s =
desviación estándar
La reparametrización en el autoencoder
permitió introducir variabilidad controlada en el espacio latente, facilitando un aprendizaje más robusto y estable.
El codificador generó la salida e y se obtuvo su media (m) y desviación
estándar (s) generando un espacio latente (rz),
modelado como una distribución de probabilidad
continua. Esto aseguró que el modelo pudiera capturar mejor las
variaciones de las imágenes distorsionadas y mejorar la calidad de la
reconstrucción, generando imágenes más fieles a las originales.
La
función de pérdida VLoss se obtiene mediante la
siguiente fórmula (4):

Donde:
Lrecon = pérdida de reconstrucción
b =
Parámetro equilibra la calidad en reconstrucción de la imagen y el espacio
latente
LKL= Pérdida
por divergencia
La siguiente ecuación (5) permite calcular Lrecon, al medir la diferencia entre la imagen
original (Ok) y
la reconstruida (Rk), utilizando el error cuadrático medio (MSE, por sus siglas en
inglés: mean squared error):
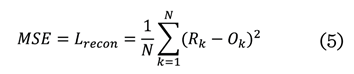
MSE = error cuadrático medio
Rk = Imagen reconstruida
Ok =
Imagen original
Por otro lado, LKL minimiza la diferencia entre la distribución latente
aprendida y la distribución previa, para regularizar el espacio latente y
evitar que el modelo memorice los datos de entrenamiento generando imágenes
reconstruidas más precisas.
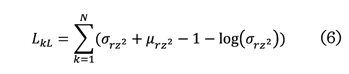
Donde:
srz2
= desviación estándar del espacio latente
m rz2
= media del espacio latente
El
parámetro b equilibra la calidad en reconstrucción de la imagen y el espacio
latente. Un valor bajo b minimiza la pérdida de reconstrucción, proporcionando
mayor calidad de la imagen reconstruida, pero con representaciones latentes
menos estructuradas. Por el contrario, un valor alto b genera representaciones de características más consistentes e
invariantes, con una menor precisión en la reconstrucción. Finalmente,
el autoencoder es utilizado para reconstruir imágenes
al aprender características de las imágenes distorsionadas durante el
entrenamiento. La función de pérdida, basada
en el MSE, fue usada para que la red neuronal aprendiera patrones de las
imágenes para su reconstrucción.
Generación del código de usuario
Generación
de la matriz de características
Una vez
entrenada la red neuronal siamesa, se generó el código de usuario. La
construcción de este código de usuario combina una matriz de características,
obtenida a partir de las salidas de las ramas
de la red neuronal siamesa con la marca de agua binaria.
La matriz
de características (fv) se obtuvo mediante la
siguiente fórmula (7):
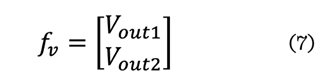
Donde:
fv =
Matriz de características
Vout1 = Vector de salida 1
generado por la red siamesa
Vout2 = Vector de salida 2
generado por la red siamesa
Los vectores de salida Vout1 y Vout2
representan las características únicas de la imagen obtenidas por las ramas de
la red neuronal B1 y B2 y se obtienen mediante las
siguientes ecuaciones (8):

Donde:
Vout1 = Vector de salida 1
generado por la red siamesa
B1 = Rama 1
de la red neuronal
Ok = Imagen
original
Vout2 = Vector
de salida 2 generado por la red siamesa
B2 = Rama 2
de la red neurnal
Rk = Imagen reconstruida
Posteriormente,
fv se
redimensionó en una matriz fvr
al mismo tamaño que la marca de agua
(512 x 512 pixeles), mediante escalado por vecinos más cercanos para
expandir el número de elementos (9):
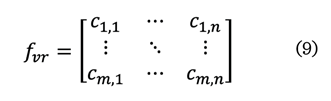
Finalmente,
fvr se binariza (fm) para crear el código de usuario (10):
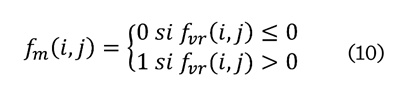
La matriz de características incluye características
espaciales como frecuenciales invariantes, lo que aumenta la robustez ante
distorsiones o manipulaciones.
Código de
usuario
El código
de usuario es un elemento externo diseñado
para autenticar la propiedad de la imagen
de manera segura. Debe almacenarse en un dispositivo dedicado para
preservar la integridad y autenticidad de la
imagen original. En un dispositivo
dedicado para preservar la integridad y autenticidad de la imagen original. Se
obtiene utilizando la operación lógica XOR (por sus siglas en inglés: O
exclusivo) y que se representa con el símbolo (Å), en la ecuación (11):

Donde:
uc =
código de usuario uc combina lógicamente
Å = operación lógica XOR
fm =
matriz de características binarizada extraída de la
imagen distorsionada mediante la red neuronal previamente entrenada.
w = código QR
Este proceso genera una imagen binaria que parece
ser ruido aleatorio. La operación XOR
proporciona un elemento robusto para la autenticación de la imagen. Este
método mejora la seguridad del código de usuario para evitar la autenticación
no autorizada de la imagen.
Reconstrucción de imagen
Recuperación de la marca de agua para la autenticación de imágenes
El
proceso de recuperación de la marca de agua permite autenticar al usuario de la
imagen. Para recuperar la marca de agua, se
aplicó la operación lógica XOR en la ecuación (12):
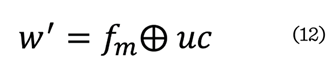
Donde:
w´= marca
de agua
Å =
operación lógica XOR
fm = matriz de características binarizada extraída de la imagen distorsionada mediante la
red neuronal previamente entrenada.
uc = código de usuario
La red
neuronal entrenada está diseñada para generar una matriz de características
similar para la misma imagen debido a la función de pérdida, incluso si ha sido
distorsionada. Como resultado, la operación XOR permite recuperar una marca de
agua w´ que es similar a la original. La
propiedad de la imagen se autenticó correctamente con la reconstrucción
de la marca de agua. Una vez recuperada la marca de agua, se empleó el autoencoder entrenado para reconstruir una versión en
escala de grises y a escala reducida (128 × 128 pixeles) de la imagen, con el
propósito de verificar su autenticidad. Este proceso de reconstrucción se
diseñó para restaurar imágenes que hayan sido sometidas a los tipos de
distorsiones incluidas durante el entrenamiento, como traslaciones, recortes,
empalmes o ataques de copia y pegado. Sin embargo, si la distorsión es severa,
la imagen reconstruida puede presentar errores o, en algunos casos, resultar en
una imagen completamente diferente. Además, el proceso de reconstrucción se limitó a imágenes pertenecientes
al conjunto de datos utilizado durante el entrenamiento, lo que garantizó que
solo reconstruyera imágenes que había aprendido a reconocer. Esta restricción disminuyó el riesgo de
reconstrucciones erróneas provenientes de imágenes no relacionadas.
Evaluación de la eficacia del algoritmo
Los
experimentos se realizaron utilizando las 110 imágenes sin manipular del
conjunto de imágenes MICC-F220, considerando la totalidad de los resultados
obtenidos, sin excluir ningún caso. Además, los experimentos se repitieron en tres ocasiones independientes, con
el objetivo de validar la consistencia y reproducibilidad
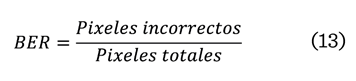
de los resultados. El algoritmo propuesto se evaluó mediante distintas
métricas para identificar las diferencias entre
las marcas de agua recuperadas y las originales: error promedio de bits (BER, por sus siglas en inglés: Bit Error Rate)
recuperados, correlación cruzada normalizada (NC, por sus siglas en
inglés: Normalized Cross-Correlation)
y la proporción máxima de señal a ruido de la imagen (PSNR, por sus siglas en
inglés: Peak Signal-to-Noise
Ratio). Estas métricas ofrecen una evaluación cuantitativa de la calidad y
fidelidad de la marca de agua recuperada, reflejando su precisión y resistencia
ante distorsiones.
El BER mide el porcentaje de pixeles incorrectos en comparación con la marca de agua original, evaluando
la precisión y los errores en el proceso de recuperación (13).
La NC
analiza la similitud entre la marca de agua recuperada w´ y la original w,
mediante la correlación entre sus pixeles. Un valor alto indica gran similitud,
mientras que uno bajo refleja diferencias significativas.

Donde:
w’ = marca de agua recuperada
w = marca de agua original
mw
y mw’= los valores promedio de
w y w’
El PSNR cuantifica la relación entre la imagen original en
escala de grises y la imagen reconstruida, evaluando la calidad visual. Un
valor alto de indica menor distorsión y mejor calidad de recuperación (15).
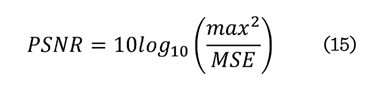
Donde:
max
= valor máximo de los pixeles
MSE = Error cuadrático medio
Las pruebas experimentales incluyeron diversas distorsiones geométricas y de procesamiento de
señal para validar la robustez del algoritmo.
RESULTADOS
Y DISCUSIÓN
Eficacia del proceso de recuperación de la marca de
agua
El
principal aporte del método propuesto, con una red neuronal siamesa basada en
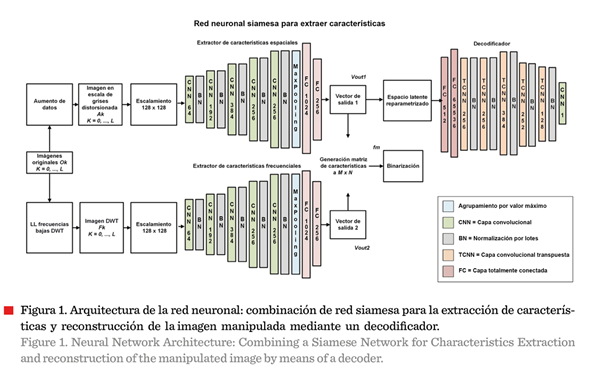
el modelo AlexNet (Figura 1), radica en su enfoque
orientado a la identificación del propietario de una imagen, mediante la
extracción y combinación de características robustas espaciales (ruta superior
en la Figura 1) y frecuenciales (ruta inferior), obtenidas por la red neuronal.
En el proceso se capturan simultáneamente patrones consistentes e invariantes
presentes en la representación frecuencial, a través de la DWT, así como en la
representación espacial en escala de grises. Mediante su posterior integración
(parte central del esquema), es posible detectar alteraciones en la estructura
de la imagen, lo que facilita su reconstrucción sin distorsiones significativas. Por otra parte, optimizar la
eficiencia computacional permitió reducir los tiempos de entrenamiento,
sin comprometer la precisión, asimismo, el
desempeño del autoconder
mostró ser eficiente para la reconstrucción de imágenes.
A
diferencia de enfoques previos, como el de Arevalo-Ancona
y col. (2024), que emplean redes siamesas centradas en características
obtenidas de una red convolucional (FCN, por sus siglas en inglés: Fully Convolutional Networks)
para autenticar al usuario, el método propuesto incorpora un Autoencoder Variacional (VAE, por sus siglas en inglés: Variational Autoencoders) en su
arquitectura. En este diseño, la salida de la rama encargada para la extracción de características de la
imagen en escala de grises se utiliza como entrada del decodificador del VAE,
lo que permite reconstruir la imagen original a partir de su representación
latente. Esta capacidad de reconstrucción no solo mejora la verificación de la
propiedad, sino que también proporciona una
herramienta eficaz para la detección de manipulaciones y la restauración
de imágenes alteradas.
Los parámetros de arquitectura de la red neuronal propuesta determinan su capacidad de
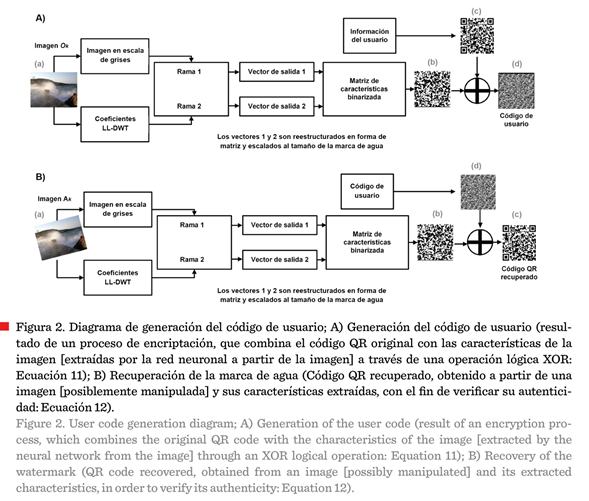
aprendizaje y desempeño (Tabla 1). En la Figura 2a se muestra el diagrama
operacional, mediante el cual, la red neuronal extrae las características de la
imagen original (compuestas por los
patrones consistentes e invariantes identificados en las representaciones
frecuenciales y espaciales de la misma) y se les integra la información
del usuario para generar el código de
usuario. En la Figura 2b se ilustra el proceso de recuperación de la marca de
agua (cuando esta ha sido alterada de forma no autorizada), que consiste
en reconocer los elementos de la imagen
distorsionada e incorporarles el código de usuario original (del propietario de
la imagen) para recuperar las características de la imagen y establecer en ella
los datos de autenticidad original.
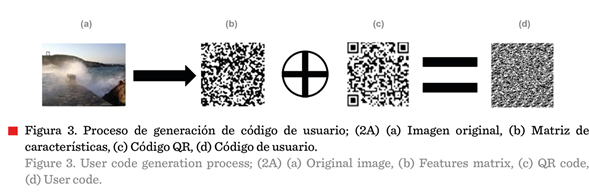
El método propuesto mejoró la seguridad del código de
usuario para evitar la autenticación no autorizada de la imagen (Figura 3). La
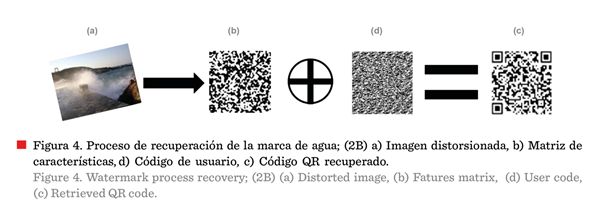
Figura 4 presenta un ejemplo de la marca de agua
recuperada de una imagen distorsionada. Las
imágenes de los códigos QR contienen información útil para evaluar visualmente
la recuperación (Figura 5). La técnica obtenida en este estudio mejoró la
extracción de características e identificó
características robustas de la imagen, incluso en presencia de distorsiones (Chakraborty y
col., 2024). Estas propiedades aumentaron el rendimiento y la verificación de propietario de las imágenes.
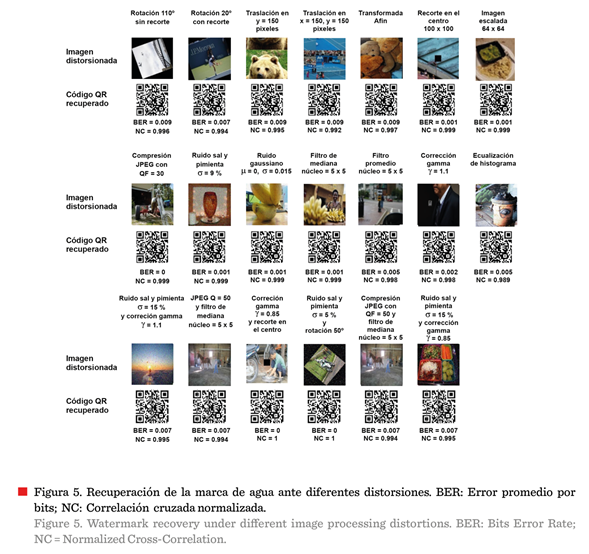
El proceso de recuperación de la marca de agua es
eficiente contra la mayoría de distorsiones
geométricas como rotación, traslación, transformación afín, recorte y escalado
(Figura 5). Sin embargo, se obtiene un error máximo cuando una imagen
específica tiene rotación con recorte (BER = 0.007, NC = 0.994); y cuando la
imagen es recortada, el valor promedio de los
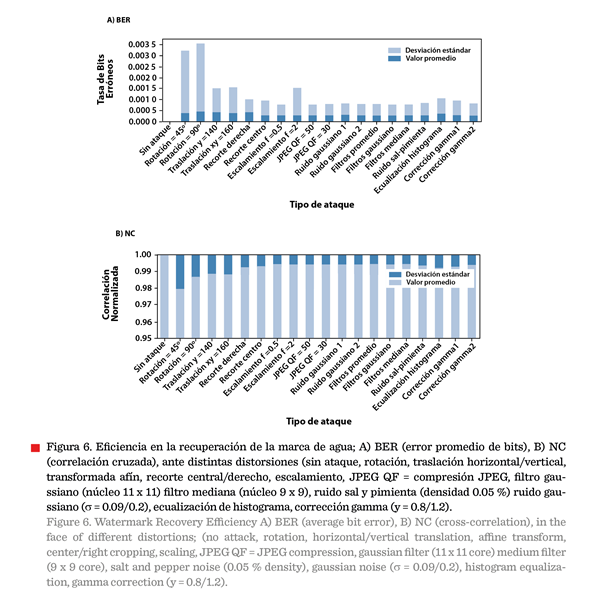
experimentos registró un BER de 0.002 y el NC arriba de 0.998 (Figura 6). Por otra
parte, la Figura 6 muestra una desviación estándar baja, lo que indica que los datos están muy concentrados cerca de la media, es
decir, que son muy similares entre
sí.
Los
resultados indicaron una alta eficiencia en la recuperación de la marca de agua cuando la
imagen tiene compresión JPEG (factor de calidad = 30), ruido sal y pimienta
(densidad = 9 %), ruido gaussiano (m = 0, s = 0.015) y operaciones de filtrado gaussiano y desenfoque (núcleo = 5
× 5). Cuando se aplica un
filtro promedio, los resultados muestran un BER máximo en promedio de 0.007 y
NC = 0.999.
Finalmente,
también se mostró una alta robustez contra la combinación de distorsiones,
logrando valores de NC superiores a 0.99 (Figura
5). La combinación de compresión JPEG y
filtrado mediano o ruido sal y pimienta con corrección gamma incrementa
el BER a 0.007, mientras que el NC se
mantiene por encima de 0.994 (Figura 6).
El método
propuesto demostró eficacia en su desempeño con técnicas existentes en términos
de precisión de recuperación de la marca de agua y tiempos de procesamiento,
destacando sus mejoras no solo de robustez y frente
a distorsiones geométricas como rotación, traslación, transformación afín, recorte
y escalado, sino también de la combinación de distintas distorsiones (Figura
7).
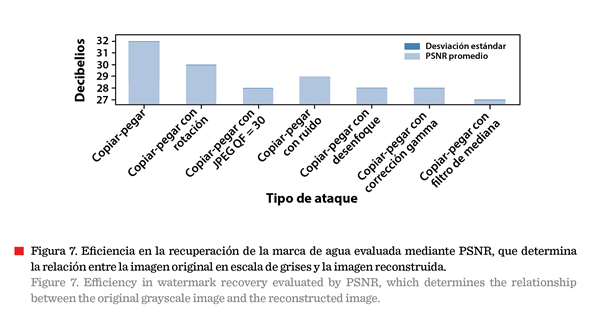
Efectividad
en la reconstrucción de imágenes
La
repetición experimental permitió verificar que el desempeño del método
propuesto no se debe a condiciones
particulares de una sola ejecución, sino que es reproducible. Aunque no se realizaron múltiples repeticiones para
un análisis estadístico más amplio, estas dos
ejecuciones permitieron confirmar que el comportamiento general del sistema
es estable y coherente. La reconstrucción de imágenes desempeña un papel
fundamental en el proceso de autenticación,
ya que recupera una versión de la imagen original en escala de grises.
Este procedimiento facilita la autenticación
de la imagen al evidenciar posibles
alteraciones o manipulaciones. La calidad
en la reconstrucción de imágenes en escala de grises sometidas a
diversas distorsiones y manipulaciones demostró que el método propuesto
mantiene un alto PSNR, con valores promedio de los experimentos que
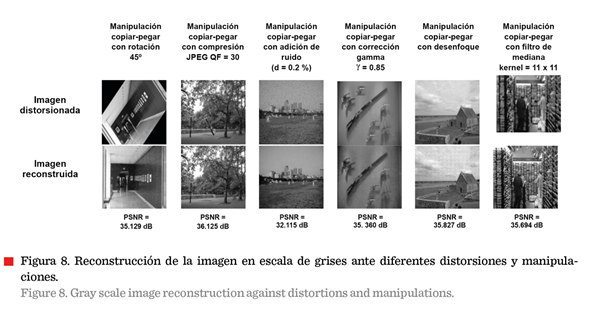
oscilan entre 30.788 dB y 36.634 dB. La Figura 8 muestra un ejemplo particular,
donde los valores oscilan entre 32.115 y
36.125. Además, el autoencoder reconstruye
eficazmente imágenes alteradas por manipulaciones de tipo copia-pegar combinadas con otras distorsiones, conservando una
alta fidelidad en la reconstrucción. Sin embargo, cuando las imágenes
son afectadas por ajustes de brillo o contraste,
como la corrección gamma, la calidad de las imágenes reconstruidas disminuye, lo que evidencia una limitación del método propuesto
frente a este tipo de distorsiones.
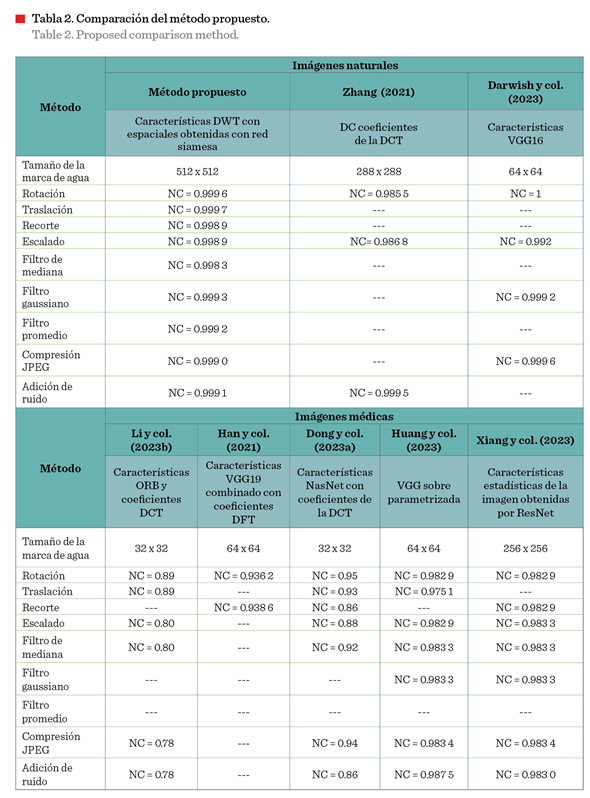
Comparación del método
El tiempo de recuperación de la marca de agua destacó la
rapidez y precisión del método propuesto frente a modelos preentrenados. Tuvo una
precisión mayor frente a enfoques existentes de marcado de agua libre de distorsiones, que las técnicas basadas en
coeficientes de la DCT (Zhang, 2021), secuencias perceptuales (Li y col.,
2023b) y modelos preentrenados
como VGG o ResNet (Han y col., 2021; Darwish y col., 2023; Huang
y col., 2023; Xiang
y col., 2023) (Tabla 2). Asimismo, el esquema
propuesto emplea una marca de agua de 512 × 512 pixeles, significativamente más grande que las utilizadas por métodos como Li y
col. (2023b) (32 × 32), Darwish y col. (2023) y Hang y col.
(2021; 2023) (64 × 64 pixeles).
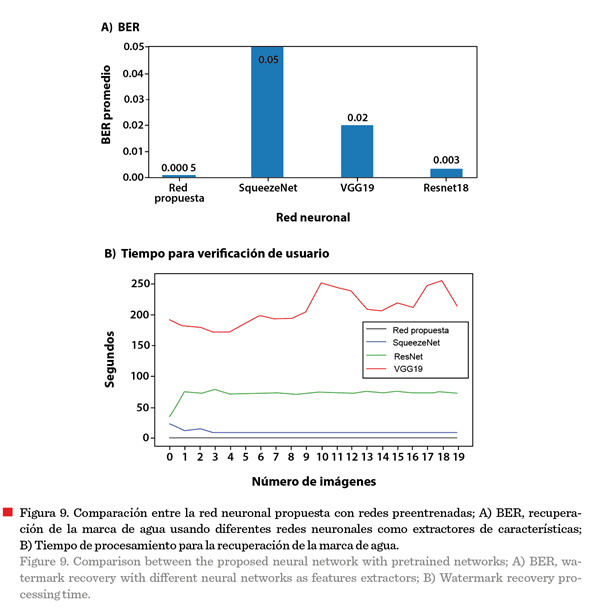
Aunque
modelos como VGG19, SqueezeNety ResNet18 son
eficientes en clasificación de imágenes, son menos efectivos al usarlos como extractores de características. Mientras que el
método propuesto ofrece mayor precisión que otras arquitecturas neuronales preentrenadas, manteniendo un BER más bajo y mejor recuperación de la marca de agua
(Figura 9), lo que se debe a la extracción de características mediante la red
siamesa, que genera representaciones
invariantes.
CONCLUSIONES
La
eficacia obtenida para la autenticación de la propiedad de la imagen, por medio
de la red neuronal propuesta, se debe a su diseño de doble rama. La primera
rama extrae los detalles visuales en dominio espacial, y la segunda rama en el
dominio DWT identifica las características generales más robustas. De esta
forma, aprende al combinar la información de la imagen en su dominio espacial y
de frecuencia extraídas mediante la DWT. La función de pérdida (al combinar
estas características) hace que la red aprenda los detalles y las generalidades
de la imagen que sean invariantes a distintos ataques. Utilizando estas
características, se logró reconstruir la imagen que identifica al propietario
con un valor BER menor a 0.002 6 y un NC superior
a 0.998. Además de la recuperación del logotipo de propiedad, se logró autenticar el contenido de la
imagen original reconstruyendo su contenido con una aproximación de PSNR entre
30.788 dB y 36.634 dB. Lo anterior se obtuvo utilizando la rama espacial como
codificador, y su correspondiente
decodificador. Finalmente, para la
autenticación de la propiedad, la red
neuronal propuesta presentó un menor costo computacional en comparación
con métodos anteriores, y una mayor variedad de ataques a los que es
resistente. Como trabajo a futuro se propone ampliar el alcance del algoritmo
propuesto para la autenticación de videos, evaluando su efectividad en secuencias de imágenes, adaptar el método
para la detección de áreas manipuladas en
imágenes y mejorar la reconstrucción enfocándose en generar imágenes a
color (RGB) y de alta definición.
Agradecimientos
Los
autores agradecen al Instituto Politécnico Nacional (IPN) y Secretaría de
Ciencias, Humanidades, Tecnología e Innovación (SECIHTI) por el apoyo brindado
en esta investigación.
DECLARACIÓN DE
INTERESES
Los autores declararon no tener conflicto de interés
alguno.
REFERENCIAS
Amini, M., Sadreazami,
H., Ahmad, M. O., & Swamy, M. N. S. (2018). A channel-dependent statistical
watermark detector for
color images. IEEE Transactions
on Multimedia, 21(1), 65-73. https://doi.org/10.1109/TMM.2018.2851447.
Amerini, I., Ballan, L., Caldelli,
R., Del-Bimbo, A., & Serra, G. (2011). A SIFT-based
forensic method for copy-move attack
detection and transformation
recovery. IEEE Transactions
on Information Forensics and Security, 6(3), 1099-1110. https://doi.org/10.1109/TIFS.2011.2129512.
Arevalo-Ancona, R. E., Cedillo-Hernandez, M., & Garcia-Ugalde,
F. J. (2024). Robust image tampering detection and
ownership authentication using zero-watermarking and Siamese neural networks. International
Journal of Advanced Computer Science and Applications, 15(10). https://doi.org/10.14569/IJACSA.2024.0151046
Aydemir, G., Paynabar,
K., & Acar, B. (2022). Robust
feature learning for remaining useful
life estimation using Siamese neural networks. In
2022 30th European
signal processing conference (EUSIPCO) (pp. 1432-1436). IEEE.https://doi.org/10.23919/EUSIPCO55093.2022.9909630.
Chakraborty, U., Thilagavathy, D., Sharma, S. K., & Singh, A. K.
(2024). Hybrid deep learning with AlexNet feature extraction and U-Net
classification for early detection in leaf diseases. ICTACT Journal on Soft
Computing, 14(3), 3255-3262. https://doi.org/10.21917/ijsc.2024.0457
Darwish, M. M., Farhat, A. A., & El-Gindy, T. M. (2023). Convolutional
neural network and 2D logistic-adjusted-Chebyshev
based zero-watermarking of color images. Multimedia Tools and Applications, 83(10), 29969-29995. https://doi.org/10.1007/s11042-023-16649-3.
Dong, F., Li, J., Bhatti, U. A., Liu, J., Chen, Y. W., & Li, D.
(2023a). Robust zero-watermarking algorithm for medical images based on
improved NasNet-Mobile and DCT. Electronics,
12(16), 3444. https://doi.org/10.3390/electronics12163444.
Dong, S., Li, J., Bhatti, U. A., Ma, J., Dong, F., & Li, Y. (2023b). Robust zero-watermarking algorithm
for medical images based on GFTT-KAZE and DCT. 26th ACIS International Winter
Conference on Software Engineering, Artificial Intelligence, Net-working and
Parallel Distributed Computing
(SNPD-Winter). https://doi.org/10.1109SNPD-Winter57765.2023.10223753
Gong, C., Liu, J., Gong, M., Li, J., Bhatti, U. A., & Ma, J. (2022).
Robust medical zero-watermarking algorithm based on Residual DenseNet. IET
Biometrics, 11(2), 135-146. https://doi.org/10.1049/bme2.12100.
Han, B.,
Du, J., Jia, Y., & Zhu, H. (2021). Zero-watermarking
algorithm for medical image based on VGG19 deep convolution neural network. Journal
of Healthcare Engineering, (1), 5551520. https://doi.org/10.1155/2021/5551520.
Huang, T., Xu, J., Tu, S., & Han, B. (2023). Robust zero-watermarking
scheme based on a depthwise overparameterized VGG network in healthcare
information security. Biomedical Signal Processing and Control, 81,
1-10. https://doi.org/10.1016/j.bspc.2022.104478.
Ikbal, F. & Gopikakamari, R. (2022). Performance analysis of SMRT-based
color image watermarking in different color. Information
Security Journal, 31(2), 157-167. https://doi.org/10.1080/19393555.2021.1873465.
Jing, W. (2020). November). Research on Digital Image Copying Watermarking
Algorithm Based on Deep Learning. In 2020
International Conference on Robots & Intelligent System (ICRIS)
(pp. 104-107). IEEE. https://doi.org/10.1109/ICRIS52159.2020.00034.
Khafaga, D. S., Alhammad S. M., Magdi, A., Elkomy, O., Lashin, N. A., &
Hosny, K. M. (2023). Securing transmitted color images using zero-watermarking
and advanced encryption standard on Raspberry Pi. Computer Systems Science
and Engineering, 4(2), 1967-1988. https://doi.org/10.32604/csse.2023.040345.
Lee, Y.
H., Seo, Y. H., & Kim, D. W. (2019). Digital hologram
watermarking by embedding Fresnel-diffracted
watermark data. Optical Engineering, 58(6), 035102. https://doi.org/10.1117/1.OE.58.3.035102.
Li, M., Liu, X., Wang, X., & Xiao, P. (2023a). Detecting building
changes using multimodal Siamese multitask networks from very-high-resolution
satellite images. IEEE Transactions on
Geoscience and Remote Sensing, 61, 1-10. https://doi.org/10.1109/TGRS.2023.3290817.
Li, Y., Li, J., Bhatti, U. A., Ma, J., Li, D., & Dong, F. (2023b).
Robust zero-watermarking algorithm for medical
images based on ORB and DCT. 26th ACIS International Winter Conference
on Software Engineering, Artificial Intelligence, Networking and
Parallel/Distributed Computing (SNPD-Winter). https://doi.org/10.1109/SNPD-Winter57765.2023.10223992.
Liu, Q. L., Yang, S. Q., Liu, J., Xiong, P. C., & Zhou, M. C. (2020). A
discrete wavelet transform and singular value
decomposition-based digital video watermark method. Applied Mathematical
Modelling, 85, 273-293. https://doi.org/10.1016/j.apm.2020.04.015.
Liu, Y. & Zhang, Z. (2021). Zero-watermarking algorithm based on DC
component in DCT domain. 2021 International Conference on Electronic Information Engineering and Computer Science (EIECS). https://doi.org/10.1109/EIECS53707.2021.9588068.
Lin, T. Y., Maire, M., Belongie, S., Bourdev, L., Girshick, R., Hays, J.,
Perona, P., Ramanan, D., Zitnick, C. L., & Dollár, P. (2015). Microsoft
COCO: Common objects in context. ArXiv. [En
línea]. Disponible en: https://doi.org/10.48550/arXiv.1405.0312.
Fecha de consulta: 15 de enero de 2025.
Shamia,
D., Balasamy, K., & Suganyadevi,
S. (2023). A secure framework for medical image by
integrating watermarking and encryption through fuzzybased ROI selection. Journal
of Intelligent & Fuzzy Systems, 44, 7449-7457. https://doi.org/10.3233JIFS-222618.
Shang,
C., Xue, Y., Liu, W. X., & Liu, Y. (2023). Visual image digital watermarking embedding algorithm combining 3D Boolean CNN and Arnold technology.
IAENG International Journal of Computer
Science, 50(4), 1221-1231.
Solorzano, C. & Tsai, D. M. (2023). Watermark detection in CMOS image sensors using cosine-convolutional semantic networks. IEEE
Transactions on Semiconductor
Manufacturing, 36(2), 279-290. https://doi.org/10.1109/TSM.2023.3245606.
Vizváry, L., Sopiak, D., Oravec, M., & Bukovčiková, Z. (2019). Image
quality detection using the Siamese convolutional neural network. In 2019
International Symposium ELMAR (pp. 109-112).
https://doi.org/10.1109/ELMAR.2019.8918678. IEEE
Wiggers, K. L., Britto, A. S., Heutte, L., Koerich, A. L., & Oliveira,
L. S. (2019). Image retrieval and pattern spotting using Siamese neural
network. 2019 International Joint Conference on Neural Networks (IJCNN). [En
línea]. Disponible en: https://doi.org/10.1109/IJCNN.2019.8852197. Fecha de
consulta: 10 de febrero de 2025.
Wu, J. Y., Huang, W. L., Zuo, M. J., & Gong, L. H. (2020). Optical
watermark scheme based on singular value decomposition ghost imaging and
particle swarm optimization algorithm. Journal of Modern Optics, 19(7),
1-13. https://doi.org/10.1080/09500340.2020.1810346.
Xiang, R., Liu, G., Li, K., Liu, J., Zhang, Z., & Dang, M. (2023). A
zero-watermark scheme for medical image protection based on style feature and
ResNet. Elsevier, 86(A), 1-11. https://doi.org/10.1016/j.bspc.2023.105127.
Ye, H.,
Huang, X., Zhu, H., & Cao, F. (2025). An enhanced network with parallel graph
node diffusion and node similarity contrastive loss for hypers-pectral
image classification. Digital
Signal Processing, 158, 104965. https://doi.org/10.1016/j.dsp.2024.104965
Zhang, Z. (2021). Zero-watermarking algorithm based on DC component in DCT
domain. 2021 International Conference on Electronic Information Engineering and
Computer Science (EIECS). [En línea]. Disponible en: https://doi.org/10.1109/EIECS53707.2021.9588068. Fecha de consulta: 10 de enero
de 2025.
Zhong, X. & Shih, F. Y. (2019). A robust image watermarking system
based on deep neural networks. ArXiv. [En
línea]. Disponible en: https://doi.org/10.48550/arXiv.1908.11331. Fecha de
consulta: 15 de enero de 2025.